高度運転支援向け単眼カメラの実装(2.深度推定と夜間走行対応)
前回、パーティクルフィルタを用いた車両の追跡を簡易的に実装しました。
こちらをさらに展開していきます。
対象車両
この装置の対象は、4輪の軽自動車、超小型車を想定しています。また車両への後付けにも対応したいと思っています。
つまり、先進運転支援システム(ADAS)にあまりお金がかけられない車両を想定しています。
高級グレードですと、LIDAR、デュアルカメラ、ミリ波レーダから何種類かを組み合わせセンサーフュージョンを構築するはずです。
単眼カメラのみを利用している車種もあります。HONDAのFITなどです。
単眼カメラ単体の場合はカメラ自体の要求仕様がかなり厳しいと思われます。
ダイナミックレンジが広くなくてはいけません。例えば、晴天時も夜間時も等しく深度推定を行う必要があります。白飛びすると測定は困難です。
また、夜間時に前方の車がブレーキをかけると制動灯が強めに光ります。この時、ダイナミックレンジがせまいと、距離が正確に測れない場合があります。
いずれにしても、車高、ボディ、フロントガラス形状などで形が決まります。
つまり車両設計時に全てが決まってしまうため、あまり柔軟性がないと言えます。とくにデュアルカメラブレーキサポートシステムの場合、車体の剛性も決まってしまいます。
想定環境
今回は単眼カメラと、停車時の車間詰め用の補助として4,5メートルくらいを測定できる安価なToFセンサを想定しています。単眼カメラはダイナミックレンジはそれほど良くなくても動くよう設計しました。
イメージセンサはビデオ会議用の2〜3千円で変えるwebカメラを想定しています。
制御側も、高性能なGPUを搭載したものではなく、ローエンドFPGAを想定しています。
実装
対象物の特徴点の変化により、深度を推定するようにしました。
雑な説明をすると、物体が近づく程この特徴点は増えます。遠ざかるほど減ります。
もちろん、対象物の大きさはまちまちなので、MATLABにより大きさを推定するロジックを作りました。
大きさによる正規化をし、深度推定を行います。
ダイナミックレンジが狭い安価なカメラで夜間の深度推定に対応する
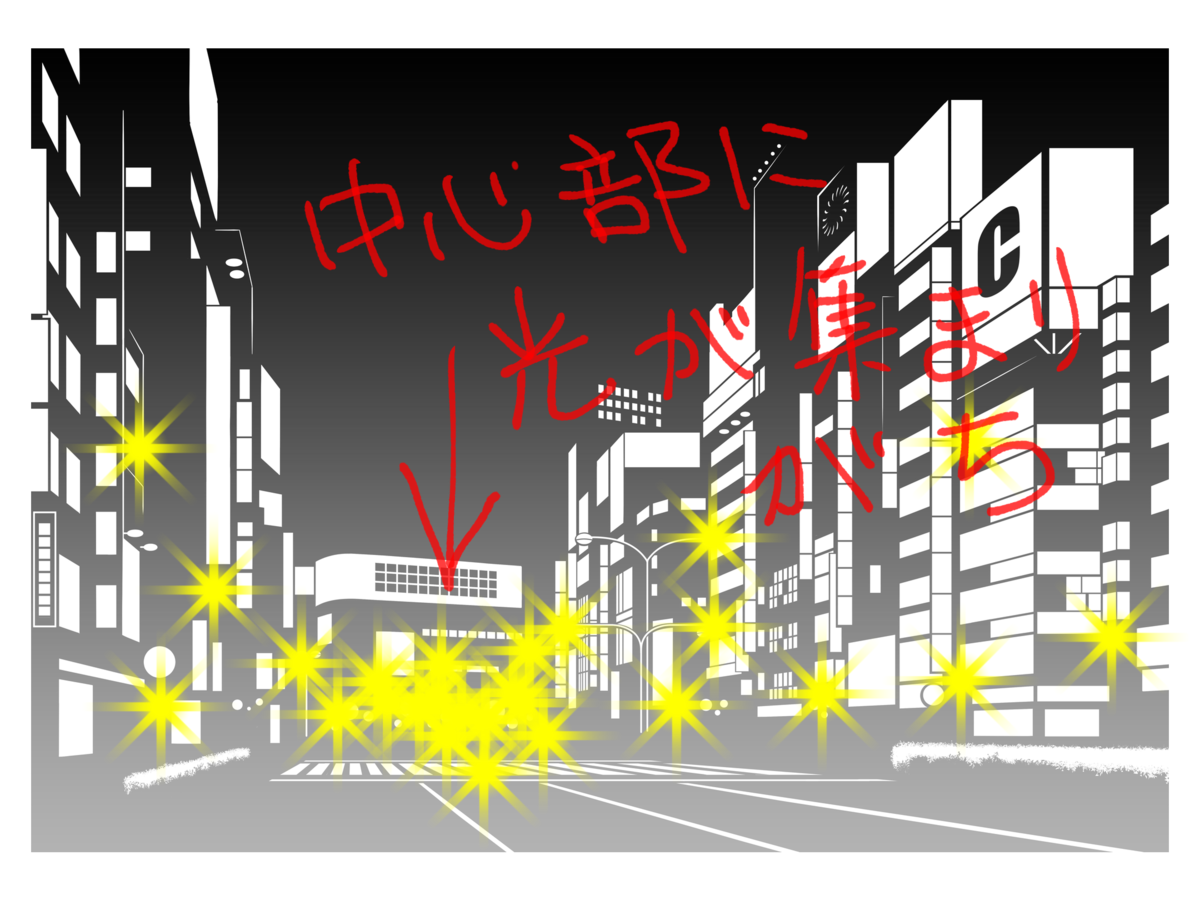
問題は夜間です。特にバイパスなどを走行していると、遠方が明るく見えます。遠近法で街灯が集中しているように見えるからです。以下の画像のような感じになります。カメラからみると実際には遠方にあるのに近く見える事故が起きます。
深度推定がすこし雑になる部分がありますが、安全側に倒した深度推定になっていると思います。
ADASご相談【法人限定】
コメントにて、ADAS試作設計など窓口を開設して欲しいとの意見を複数頂戴しています。
取り急ぎとなり恐縮ですが、フォームを作成いたしました。法人のみですが、設計のご相談・イベント展示用から量産前設計までのコンサルティングを賜ります。お問合わせフォームからご連絡ください。
(お問合せフォームは大まかな位置情報・ブラウザ情報を取得しています。ご了承ください)
https://kyogens.wixsite.com/-site-1